Маленький подводный робот двигает большую науку
20.03.2025
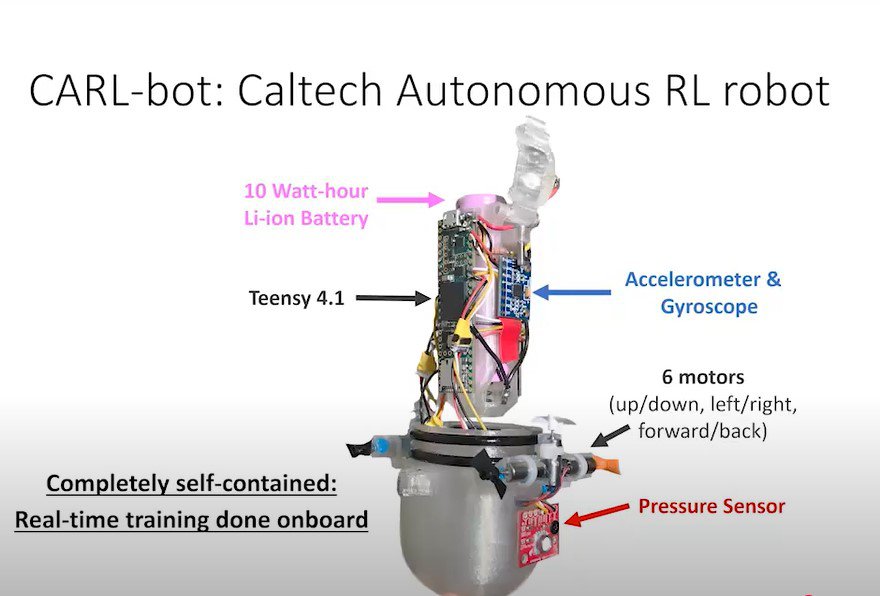
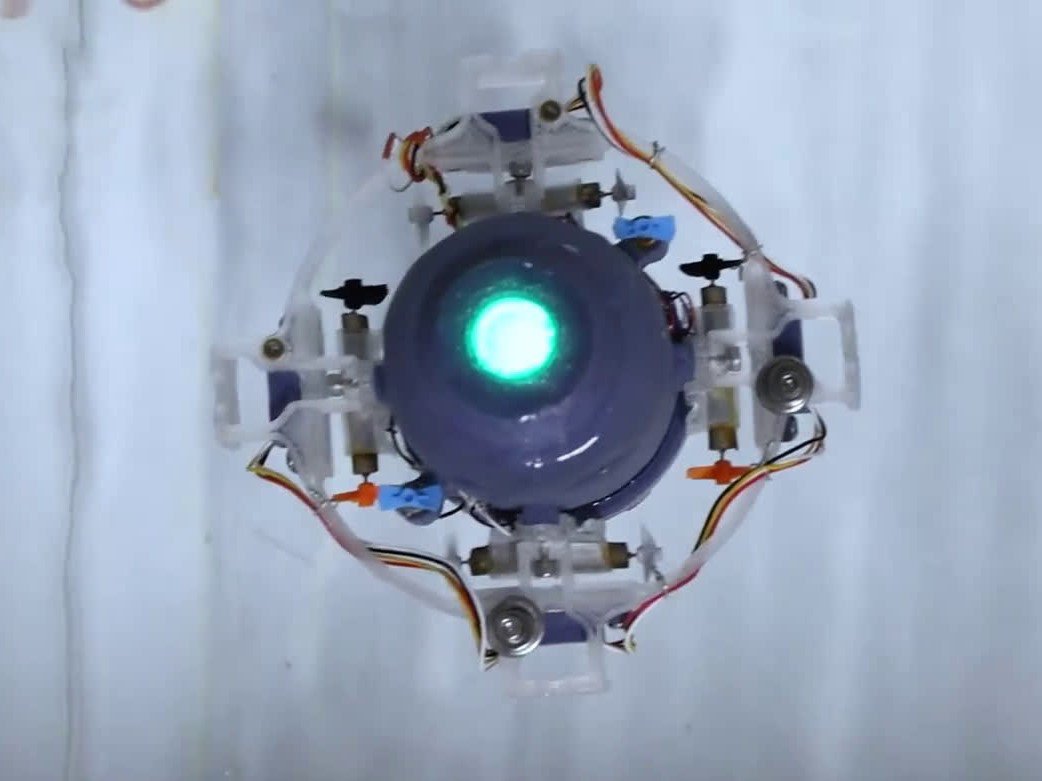
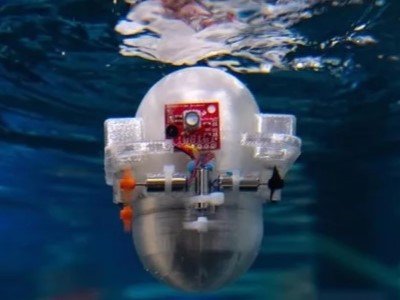
Подводный робот размером с ладонь, созданный в Калифорнийском технологическом институте, показал способность сэкономить до 80% энергии двигаясь «на волне». В бассейне глубиной глубиной 1,5 м и длиной 5 м, с помощью импульсно включаемого движителя создавалось вихревое течение, которое «ловил» CARL-Bot (Caltech Autonomous Reinforcement Learning Robot). Алгоритм запущенный на Teensy 4.1 был таков: если величина ускорения в направлении поперечного потока превышала пороговое значение, CARL плыл в том же направлении, что и ускорение. Исследование опубликовано в научном журнале PNAS Nexus.