Micro Underwater Robot 2.0 - СНЯТ С ПРОИЗВОДСТВА!
Робототехнический конструктор Автономного подводного робота Micro Underwater Robot 2.0. Конструктор позволяет старшим школьникам и студентам собирать подводных роботов по собственному дизайну, программировать их на выполнение различных задач. В комплекте MUR есть датчики положения, что позволяет совместно с обработкой данных видеосъемки осуществлять навигацию в подводном пространстве. Во Владивостоке и Казани проводятся соревнования "Водные интеллектуальные робототехнические системы" в рамках регионального и всероссийского этапа WRO (World Robotics Olympiad). Команды, использующие наш конструктор, уже третий год успешно выступают на данных соревнованиях. http://robolymp.ru/season-2017/rules-and-regulations/vodnye-irs/. Разработка велась при финансовой поддержке фонда Сколково. Данный проект реализовывался при поддержке Фонда Содействия Инновациям.
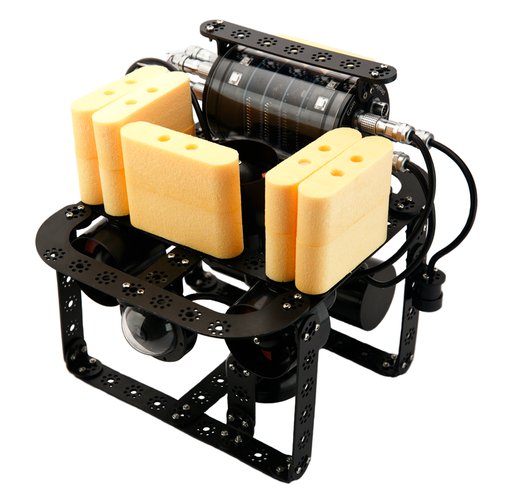
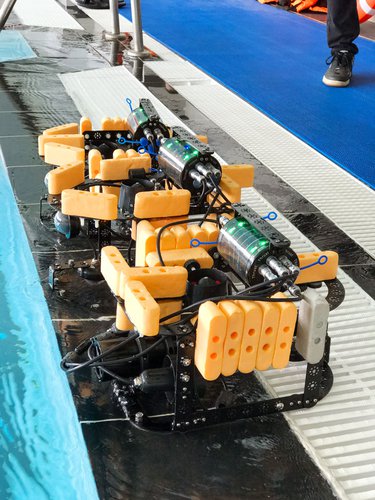
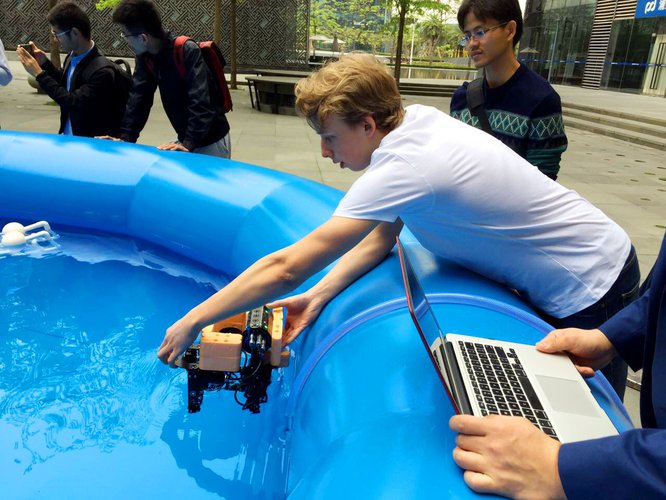
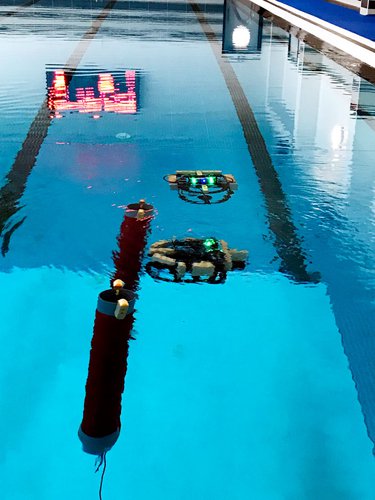
Фото



Особенности
Конструирование
В процессе сборки «MUR Edu» допускает множество работоспособных конфигураций обеспечивая изучение принципов конструирования и компоновки подводных аппаратов.
Навигация
Широкие возможности программирования бортового компьютера позволяют изучать и тестировать алгоритмы автоматического управления, строить адаптивные системы навигации в водной среде.
Алгоритмы
Видеокамеры и гидроакустические устройства дают возможность изучения и использования алгоритмов компьютерного зрения.
Гидродинамика
Испытания различных конструкций дают возможность изучать особенности гидродинамики подводных роботов, корректировать модели с учетом гидродинамического сопротивления.
Применение
Основная область применения - это образовательная робототехника. С помощью нашего конструктора можно изучать следующие дисциплины:
- Гидродинамика
- Балластировка
- Обеспечение остойчивости
- Изучение сопротивления среды и течений
- Алгоритмы
- Алгоритмы автоматического управления (регуляторы)
- Алгоритмы компьютерного зрения
- Подводная навигация
- Использование магнитного курса
- Инерциальная навигационная система
- Позиционирование на определённой глубине
- Конструирование
- Принципы конструирования подводных аппаратов
- Размещение основных элементов (движителей, камер, автопилота)
Второй областью является участие команд в соревнованиях (хобби), например MATE ROV Competition (при использовании робота в режиме телеуправления), Robosub (в автономном режиме) и в рамках Всероссийской робототехнической олимпиады есть водная категория (http://edurobots.ru/2016/06/pervyj-zaplyv-na-vserossijskoj-olimpiade-robotov-teper-est-vodnaya-kategoriya/).
Третья - прикладная. Робототехнический набор может быть использован аквалангистами, владельцами катеров и яхт для исследования дна водоёма или днища судна.
Размеры
Из набора можно построить подводный аппарат различных конфигураций и размера.
Характеристики
Общие
Вес на воздухе - 5,5 кг
Глубина погружения - до 5 м
Бортовой компьютер - на базе Intel Edison
Связь с роботом - Wi-Fi
Язык программирования - С++
Производительность
Тяга одного движителя - до 0,4 кгс (0,3 на реверсе)
Автономность - до 1 ч (при макс. нагрузке)
Разрешение изображения - до 1288 х 728
Компьютерное зрение - до 15 кадров в секунду
Максимальное количество устройств
Движителей - 4
Камер - 2
Навесных датчиков - 2
Точность измерения
Глубины - 2 мм
Курса - 3 градуса
Крена/диффирента - 1 градус