
MiddleUSV
Набор MiddleUSV - безэкипажное судно, работающее в автономном или телеуправляемом режиме. Рассчитан на школьников 8-11 классов и студентов вузов. MiddleUSV поставляется в собранном виде. Набор предназначен для демонстрационных, образовательных и соревновательных целей. MiddleUSV с помощью собственных движителей может передвигаться по поверхности водоема, производя видеосъемку объектов, расположенных на поверхности воды и на берегу, и выполнять заложенную в него программу. MiddleUSV имеет камеру, аккумулятор и навигационно-пилотажный датчик.
Набор позволяет подготовить судно для участия в соревнованиях, таких как Всероссийские соревнования роботизированных лодок и RoboBoat.
Также с помощью MiddleUSV можно проводить исследования в реальных условиях.
Комплектация:
- аппарат (в собранном виде)
- ключ для гермовводов
- набор грузов для балластировки
- зарядное устройство
- MUR IDE
Фото
Особенности
MiddleUSV поставляется в собранном варианте и сразу готов к использованию. Аппарат работает в двух режимах - телеуправлении и на автопилоте. Телеуправление судном осуществляется в виртуальной среде MUR IDE. Для программирования робота на выполнение различных задач используется язык программирования Python и специальный API для получения телеметрии и управления движителями.
Применение
Набор может применяться для изучения особенностей управления автономными безэкипажными судами. С его помощью можно также изучать акваторию водоемов и прибрежных территорий. Также с данным набором можно участвовать в соревнованиях роботизированных лодок.
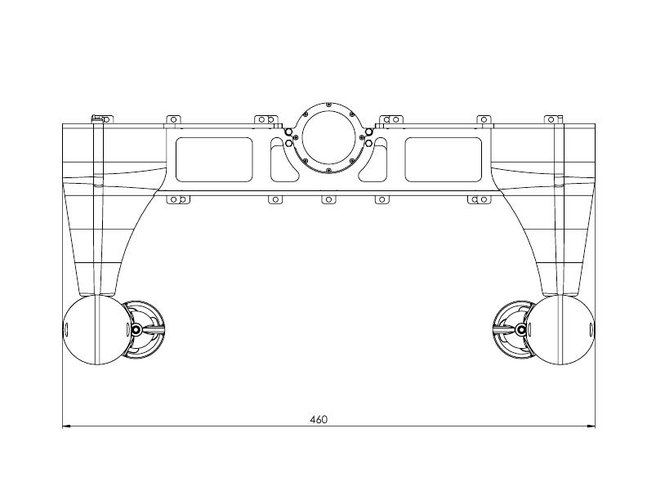
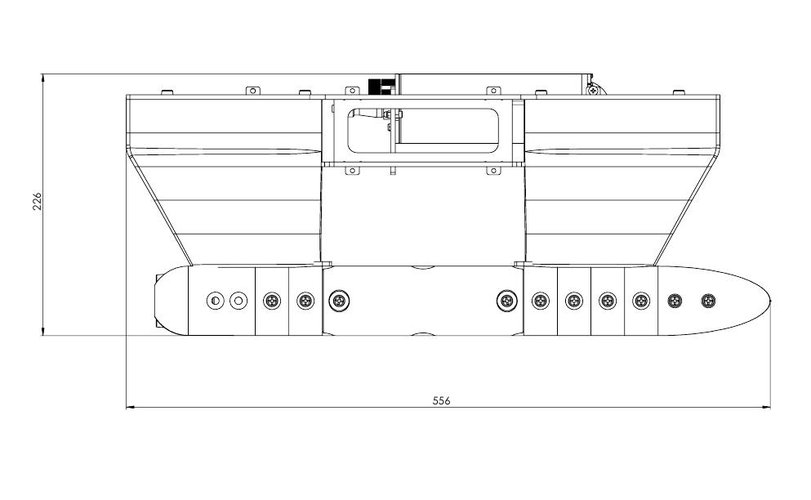
Размеры
Длина: 600 мм, Ширина: 465 мм, Высота: 210 мм
Характеристики
Внимание! В зависимости от версии характеристики товара могут отличаться.
Общие технические характеристики набора
- Вес робота - 2,2 кг
- Габаритные размеры (ДхШхВ): 600 х 465 х 210 мм
- Точность позиционирования по курсу: 5 градусов
- Связь: Wi-Fi, Ethernet
- Язык программирования: Python
- Бортовой компьютер: на базе Raspberry PI compute module 4
- Разрешение камеры: 1080p
- Производительность СТЗ: 10-20 кадр/секунду (при разрешении 640х480)
- Сенсор: 5 Мп
- Тяга одного движителя: до 0,5 кгс (при 12 В)
- Скорость, км/ч: 5
- Автономность: 3 часа
Движитель подводный MT200
- Вес на воздухе, кг: 0,1
- Габаритные размеры (без БУД) (Д х Ш х В), м: 0,058х0,050х0,050
- Гребной винт (диаметр), мм: 37
- Тяга в прямом направлении, кгс: 0,2 (при 12 В)
- Тяга при реверсе, кгс: 0,15 (при 12 В)
- Диапазон напряжений питания, В: от 7,5 до 12,6
- Максимальный ток потребления, А: 15 А
- Защита от короткого замыкания в двигателе: Нет
- Интерфейс связи: PWM
Блок электроники
- Микрокомпьютер: Raspberry PI compute module 4
- Крышка
- Фланец
- Уплотнительные кольца
- Купол (55мм)
- Выключатель
- Разъем для Ethernet и зарядки
- Батарея
- Камера
Комплект плавучести
- Наименование: Экструдированный пенополистирол
- Плотность, кг/м3: 35
Зарядное устройство с разъёмом
- Диапазон напряжений сети: 100-240 В (50 Гц и 60 Гц)
- Особенности: подключение к судну через герметичный разъем
- Диапазон напряжений питания: 10,8 - 12,6В (при токе 1 А)
Батарея
- Напряжение, В: 9-12,6
- Максимальный ток разряда, А: 25
- Емкость, мАч: 3000
Микрокомпьютер
- Тактовая частота процессора, ГГц: 1,5
- Оперативная память, Гб: 1
- Наличие Wi-Fi: есть
- Наличие Ethernet: есть
- Размеры (ДхШ), мм: 55,6х40
Внимание! Для управления лодкой необходим персональный компьютер (ноутбук) с wi-fi сетевой картой и Ethernet портом, который не входит в комплект поставки.